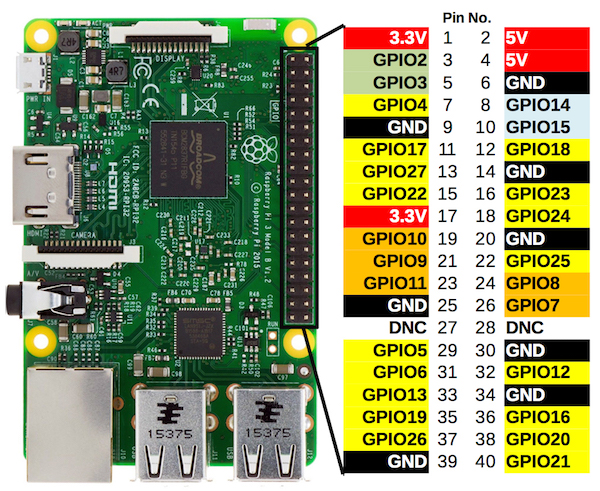
The Raspberry Pi’s 40-pin GPIO connector often gets overlooked. Typical Pi projects use the hardware as a very small desktop PC (RetroPie, Pi-hole, media center, print server, etc), and don’t make any use of general-purpose IO pins. That’s too bad, because with a little bit of work, the Raspberry Pi can make a powerful physical computing device for many applications.
Raspberry Pi vs Arduino (and other microcontrollers)
Why would you want to use a Raspberry Pi instead of an Arduino or other microcontroller (STM32, ATSAM, PIC, Propeller)? There are loads of “Raspberry Pi vs Arduino” articles on the web, and in my view almost all of them miss the mark. The Pi is not a better, more powerful Arduino. It’s a completely different type of device, better at some tasks, but markedly worse at others.
The Pi is vastly more powerful than something like an Arduino Uno. The latest Pi 3 Model B+ has an 88x faster CPU clock and 500,000x more RAM than the Uno. It also runs a full-fledged Linux operating system, so it’s much easier to create projects involving high-level functions like networking or video processing. And you can connect a standard keyboard, mouse, and monitor, and use it as a normal computer.
But the Pi operating system is also a huge weakness in many applications. There’s no “instant on”, because it takes nearly a minute for the device to boot up. There’s no appliance-like shutoff either – the Pi must be cleanly shutdown before power is turned off, or else the operating system files may get corrupted. And real-time bit twiddling of GPIO is mostly impossible, because the kernel may swap out your process at any moment, making precise timing unpredictable.
In theory it’s possible to do bare-metal programming on the Raspberry Pi, eliminating Linux and its related drawbacks for real-time applications. Unfortunately this doesn’t seem to be a common practice, and there’s not much information available about how to do it. So the Pi is probably best for those applications where you need some major CPU horsepower and some kind of GPIO connection to other sensors or equipment, but don’t need precise real-time behavior or microsecond-level accuracy.
GPIO and Python?
If you start Googling for “Raspberry Pi GPIO programming”, you’ll quickly discover that most of the examples use the Python language. In fact, this seems to be the most popular way by far to use GPIO on the Pi.
I have nothing against Python, but I’m a C programmer through and through, and the idea of using a high-level language for low-level digital interfaces is unappealing. By one measure, Python is over 300x slower at Raspberry Pi GPIO manipulation than plain C. I’m sure there are applications where it’s OK to throw away 99.7% of potential performance, but I’ll be sticking with C, thank you very much.
I spent a little time researching four different methods of Raspberry Pi GPIO manipulation in C. This involved reading documentation and data sheets, and examining the source code of various libraries. I haven’t yet tried writing any code using these methods, so take my impressions accordingly.
If any of the authors of these C libraries happen to read this – thank you for your work, and please don’t be offended by any criticisms I may make. I understand that creating an IO library necessarily involves many tradeoffs between simplicity, speed, flexibility, and ease of use, and not everyone will agree on the best path.
Direct Register Control – No Library
The GPIO pins on the Raspberry Pi can be directly accessed from C code, similarly to how it’s done on the ATMEGA or other microcontrollers. A few different memory-mapped control registers are used to configure the pins, and to read input and set output values. The only big difference is that the code must first call mmap() on /dev/mem or /dev/gpiomem, to ask the kernel to map the appropriate region of physical memory into the process’s virtual address space. If that means nothing to you, don’t worry about it. Just copy a couple of dozen lines of code into your program’s startup routine to do the mmap, and the rest is fairly easy.
Here’s an example of reading the current value of GPIO 7:
if (gpio_lev & (1<<7)) // pin is high else // pin is low
Just test a bit at a particular memory address - that's it. This looks more-or-less exactly like reading GPIO values on any other microcontroller. gpio_lev is a memory-mapped register whose address was previously determined using the mmap() call during program initialization. See section 6 of the BCM2835 Peripherals Datasheet for details about the GPIO control registers.
Setting the output value of GPIO 7 is similarly easy:
gpio_set |= (1<<7); // sets pin high gpio_clr |= (1<<7); // sets pin low
Using other control registers, it's possible to enable pull-up and pull-down resistors, turn on special pin functions like SPI, and change the output drive strength.
Watch out for out-of-order memory accesses! The datasheet warns that the system doesn't always return data in order. This requires special precautions and the use of memory barrier instructions. For example:
a_status = *pointer_to_peripheral_a; b_status = *pointer_to_peripheral_b;
Without precautions, the values ending up in the variables a_status and b_status can be swapped. If I've understood the datasheet correctly, a similar risk exists for GPIO writes. Although data always arrives in order at a single destination, two different updates to two different peripherals may not be performed in the same order as the code. These out-of-order concerns were enough to discourage me from trying direct register IO with my programs.
Wiring Pi
WiringPi wraps the Raspberry Pi GPIO registers with an API that will look very familiar to Arduino users: digitalRead(pin), digitalWrite(pin, value). It's a C library, but third parties have added wrappers for Python and other high-level languages. From a casual search of the web, it looks like the most popular way to do Raspberry Pi GPIO programming in C.
WiringPi appears to be designed with flexibility in mind, at the expense of raw performance. Here's the implementation of digitalRead():
int digitalRead (int pin)
{
char c ;
struct wiringPiNodeStruct *node = wiringPiNodes ;
if ((pin & PI_GPIO_MASK) == 0) // On-Board Pin
{
/**/ if (wiringPiMode == WPI_MODE_GPIO_SYS) // Sys mode
{
if (sysFds [pin] == -1)
return LOW ;
lseek (sysFds [pin], 0L, SEEK_SET) ;
read (sysFds [pin], &c, 1) ;
return (c == '0') ? LOW : HIGH ;
}
else if (wiringPiMode == WPI_MODE_PINS)
pin = pinToGpio [pin] ;
else if (wiringPiMode == WPI_MODE_PHYS)
pin = physToGpio [pin] ;
else if (wiringPiMode != WPI_MODE_GPIO)
return LOW ;
if ((*(gpio + gpioToGPLEV [pin]) & (1 << (pin & 31))) != 0)
return HIGH ;
else
return LOW ;
}
else
{
if ((node = wiringPiFindNode (pin)) == NULL)
return LOW ;
return node->digitalRead (node, pin) ;
}
}
That's a lot of code to accomplish what could be done by testing a bit at an address. To be fair, this code does a lot more, such as an option to access GPIO using sysfs (doesn't require root?) instead of memory-mapped registers, and pin number remapping. It also adds a concept of on-board and off-board pins, so that pins connected to external GPIO expanders can be controlled identically to pins on the Raspberry Pi board itself.
From a brief glance through the source code, I couldn't find any use of memory barriers. I'm not sure if the author determined that they're not necessary somehow, or if out-of-order read/writes are a risk.
WiringPi also includes a command line program called gpio that can be used from scripts (or interactively). It won't be high-performance, but it looks like a great tool for testing, or for when you just need to switch on an LED or something else simple.
pigpio
pigpio is another GPIO library, and appears more geared towards simplicity and speed. And yes, it was quite a while before I recognized the name was Pi GPIO, and not Pig Pio. 
Here's pigpio's implementation of gpioRead():
#define BANK (gpio>>5)
#define BIT (1<<(gpio&0x1F))
int gpioRead(unsigned gpio)
{
DBG(DBG_USER, "gpio=%d", gpio);
CHECK_INITED;
if (gpio > PI_MAX_GPIO)
SOFT_ERROR(PI_BAD_GPIO, "bad gpio (%d)", gpio);
if ((*(gpioReg + GPLEV0 + BANK) & BIT) != 0) return PI_ON;
else return PI_OFF;
}
Here there's no pin number remapping or other options. The function does some error checking to ensure the library is initialized and the pin number is valid, but otherwise it's just a direct test of the underlying register.
As with WiringPi, I did not see any use of memory barriers in the source code of pigpio.
bcm2835
bcm2835 is a third option for C programmers looking for a Raspberry Pi GPIO library. It appears to have the most thorough and well-written documentation, but also seems to be the least commonly used library of the three that I examined. This may be a result of its name, which is the name of the SoC used on the Raspberry Pi. It's somewhat difficult to find web discussion about this library, as opposed to the chip with the same name.
Like pigpio, bcm2835 appears more focused on providing a thin and fast interface to the Pi GPIO, without any extra options. Here's the implementation of bcm2835_gpio_lev(), the oddly-named read function:
uint32_t bcm2835_peri_read(volatile uint32_t* paddr)
{
uint32_t ret;
if (debug)
{
printf("bcm2835_peri_read paddr %p\n", (void *) paddr);
return 0;
}
else
{
__sync_synchronize();
ret = *paddr;
__sync_synchronize();
return ret;
}
}
uint8_t bcm2835_gpio_lev(uint8_t pin)
{
volatile uint32_t* paddr = bcm2835_gpio + BCM2835_GPLEV0/4 + pin/32;
uint8_t shift = pin % 32;
uint32_t value = bcm2835_peri_read(paddr);
return (value & (1 << shift)) ? HIGH : LOW;
}
The pin number is constrained to the range 0-31, but otherwise there's no error checking. The actual read of the GPIO register is performed by a helper function that includes memory barriers before and after the read.
Impressions
For my purposes, I would probably choose pigpio or bcm2835, since I prefer a thin API over one with extra features I don't use. Of those two options, I'd tentatively choose bcm2835 due to the format of its documentation and its use of memory barriers. I wish I understood the out-of-order risk better, so I could evaluate whether the apparent absence of memory barriers in the other libraries is a bug or a feature.
Any analysis that looks at just a single API function is clearly incomplete - if you're planning to do Rasbperry Pi GPIO programming, it's certainly worth a deeper look at the many other capabilities of these three libraries. For example, they differ in their support for handling interrupts, or byte-wide reads and writes, or special functions like SPI and hardware PWM.
Did I miss any other C programming options for Raspberry Pi GPIO, or overlooked something else obvious? Leave a note in the comments.